బహుళ స్థానాల నుండి ఎలక్ట్రిక్ డ్రైవ్ నియంత్రణ పథకాలు
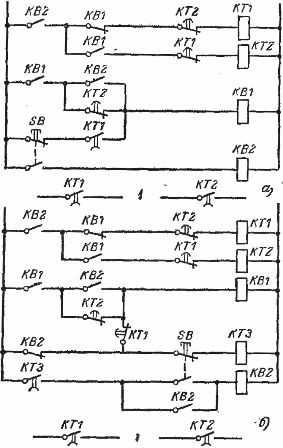
 నిరంతర ప్రక్రియ పంక్తుల కోసం, డ్రైవ్లు ప్రధానంగా ఒక దిశలో (ఫార్వర్డ్) పని చేస్తాయి మరియు రివర్సల్స్ అరుదుగా ఉంటాయి, బ్రేకర్ ద్వారా "ఫార్వర్డ్" ఆపరేషన్ కోసం లైన్ కాంటాక్టర్ను చేర్చడంతో సర్క్యూట్ (Fig. 1) ను ఉపయోగించమని సిఫార్సు చేయబడింది మరియు "రివర్స్" ఆపరేషన్ కోసం — KMR కాంటాక్టర్ యొక్క పరిచయాలను యాక్టివేట్ చేయడం ద్వారా. ఈ అమరిక డ్రైవ్ను ఇష్టపడే దిశలో ప్రారంభించడానికి సమయాన్ని తగ్గిస్తుంది.
నిరంతర ప్రక్రియ పంక్తుల కోసం, డ్రైవ్లు ప్రధానంగా ఒక దిశలో (ఫార్వర్డ్) పని చేస్తాయి మరియు రివర్సల్స్ అరుదుగా ఉంటాయి, బ్రేకర్ ద్వారా "ఫార్వర్డ్" ఆపరేషన్ కోసం లైన్ కాంటాక్టర్ను చేర్చడంతో సర్క్యూట్ (Fig. 1) ను ఉపయోగించమని సిఫార్సు చేయబడింది మరియు "రివర్స్" ఆపరేషన్ కోసం — KMR కాంటాక్టర్ యొక్క పరిచయాలను యాక్టివేట్ చేయడం ద్వారా. ఈ అమరిక డ్రైవ్ను ఇష్టపడే దిశలో ప్రారంభించడానికి సమయాన్ని తగ్గిస్తుంది.
అంజీర్లోని రేఖాచిత్రం. 2 కదిలే వస్తువు నుండి ఎలక్ట్రిక్ మోటారు యొక్క రిమోట్ రివర్సిబుల్ నియంత్రణను అనుమతిస్తుంది. ఈ సర్క్యూట్ ఉపయోగించబడుతుంది, ఉదాహరణకు, క్రేన్ నుండి తాపన బాగా కవర్లు మోటార్లు నియంత్రించడానికి. సిగ్నల్ సర్క్యూట్లు మరియు వివిధ సిగ్నల్ల స్వీకరణ అంజీర్లో చూపబడ్డాయి. 3 - 9.
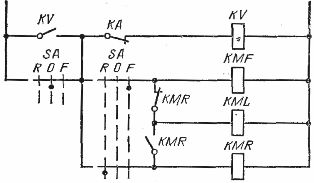
అన్నం. 1. అరుదైన వెనుక «వెనుక» తో వెనుక ఇంజిన్ నియంత్రణ పథకం.
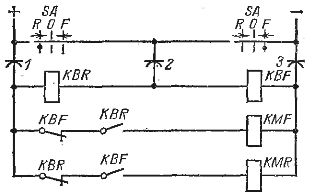
అన్నం. 2. కంట్రోల్ ట్రోల్ ద్వారా మోటారు యొక్క రివర్సిబుల్ నియంత్రణ పథకం.
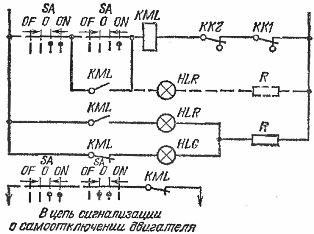
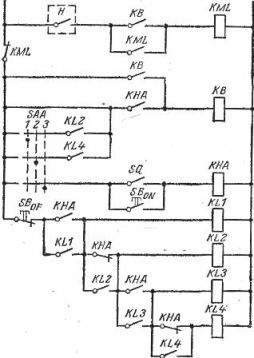
అన్నం. 3. కోలుకోలేని ఎలక్ట్రిక్ డ్రైవ్ యొక్క స్థితిని సిగ్నలింగ్ చేసే పథకం.
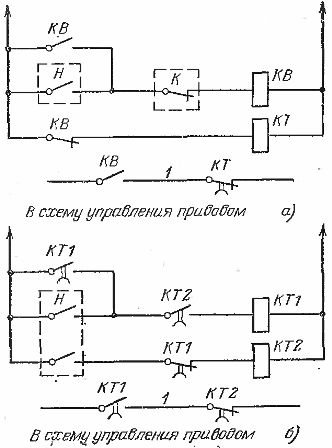
అన్నం. 4.సుదీర్ఘ (ఎ) మరియు పల్సెడ్ (బి) సిగ్నల్కు బహిర్గతం అయిన తర్వాత సమయ ఆలస్యంతో సిగ్నల్ను స్వీకరించడానికి సర్క్యూట్లు: K - అన్లాకింగ్ పరిచయం, 1 - డ్రైవ్ యొక్క కంట్రోల్ సర్క్యూట్కు పరిచయాలు.
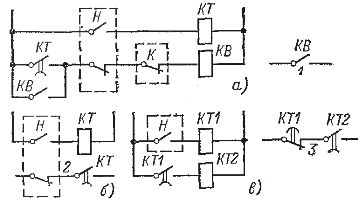
అన్నం. 5. సిగ్నల్ H లాంగ్ (a), పల్స్ (b), సమయ ఆలస్యం (c)తో పల్స్ యొక్క బీట్ (టెయిల్ నుండి) ముగిసిన తర్వాత సిగ్నల్ స్వీకరించడానికి పథకాలు. K — అన్లాకింగ్ పరిచయం, 1, 2, 3 — డ్రైవ్ కంట్రోల్ సర్క్యూట్కు పరిచయాలు.
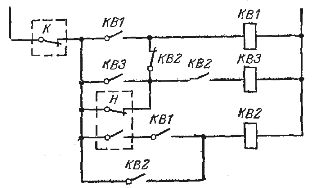
అన్నం. 6. సెకండరీ హెచ్ ప్రారంభమైన తర్వాత సుదీర్ఘ సంకేతాన్ని స్వీకరించే పథకం.
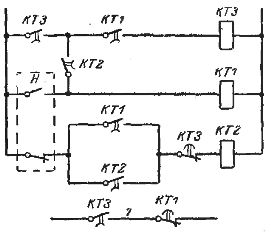
అన్నం. 7. సిగ్నల్ H (KT1 0.2-0.8 సె; KT2 0.3 సె; KTZ 0.5 సె) యొక్క ద్వితీయ చర్య తర్వాత సమయం ఆలస్యంతో పల్స్ సిగ్నల్ను స్వీకరించే పథకం. 1 - డ్రైవ్ కంట్రోల్ సర్క్యూట్కు పరిచయాలు.
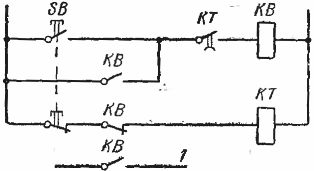
అన్నం. 8. బటన్ను నొక్కే వ్యవధితో సంబంధం లేకుండా, నిర్దిష్ట వ్యవధి యొక్క సిగ్నల్ను స్వీకరించడానికి పథకం: 1 - డ్రైవ్ కంట్రోల్ సర్క్యూట్కు సంప్రదించండి.
నిర్దిష్ట సంఖ్యలో కార్యకలాపాలు లేదా చక్రాలను లెక్కించిన తర్వాత డ్రైవ్ను స్వయంచాలకంగా ప్రభావితం చేయడానికి లెక్కింపు పథకాలు ఉపయోగించబడతాయి. వారు మూసివేతలు మరియు ఓపెనింగ్లను (Fig. 10), మాత్రమే మూసివేతలు (Fig. 11) లేదా ఓపెనింగ్లను మాత్రమే లెక్కించగలరు (Fig. 12).
సూచించిన పథకాల ప్రకారం లెక్కింపు పప్పులు ఫోటో రిలే పరిచయాలు, మోషన్ స్విచ్లు లేదా ఇతర పరికరాల నుండి సరఫరా చేయబడతాయి.
అంజీర్లో చూపిన లెక్కింపు పథకంలో. 10, REV850 రిలే ఆర్మేచర్ యొక్క అయస్కాంత "అంటుకోవడం"తో ఉపయోగించబడుతుంది మరియు అందువల్ల ఈ సర్క్యూట్కు వోల్టేజ్ సరఫరా యొక్క అంతరాయం లెక్కింపుకు భంగం కలిగించదు. ఇతర లెక్కింపు సర్క్యూట్లలో, వోల్టేజ్ సరఫరా అంతరాయం కలిగి ఉన్నప్పుడు, పల్స్ గణన యొక్క నష్టం ఉంది.
ఖాతా పథకం యొక్క చెల్లుబాటును తనిఖీ చేయడానికి (Fig. 11), నియంత్రణ బటన్లు… మీరు SB0N బటన్ను నొక్కిన ప్రతిసారి, సర్క్యూట్ ఒక గణనను నిర్వహిస్తుంది. కౌంటర్ని రీసెట్ చేయడానికి SB0F బటన్ ఉపయోగించబడుతుంది.ఇటువంటి బటన్లు ఇతర పథకాలలో కూడా అందించబడతాయి.
అన్నం. 9. ఒక బటన్ను వరుసగా నొక్కడం ద్వారా రెండు వేర్వేరు సర్క్యూట్లలో సిగ్నల్లను స్వీకరించడానికి సర్క్యూట్లు: a — సిగ్నల్ యొక్క వ్యవధి బటన్ను నొక్కే వ్యవధికి సమానం, b — సిగ్నల్ యొక్క వ్యవధి బటన్ను నొక్కే వ్యవధిపై ఆధారపడి ఉండదు. , 1 — డ్రైవ్ కంట్రోల్ సర్క్యూట్కు పరిచయాలు.
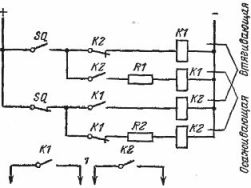
అన్నం. 10. రెండు వరకు ఖాతా యొక్క పథకం.
ప్రతి సంఖ్యకు పప్పులు పరిమితి స్విచ్ SQ యొక్క పరిచయం యొక్క ఒక ముగింపు మరియు ఒక తెరవడం; 1 - డ్రైవ్ కంట్రోల్ సర్క్యూట్కు పరిచయాలు.
అంజీర్ యొక్క సర్క్యూట్లలో పప్పులను లెక్కించడం. 11, 12 SQ పరిచయం యొక్క స్వల్పకాలిక మూసివేతలు (ఓపెనింగ్లు), మరియు ఈ పరిచయం యొక్క క్లోజ్డ్ స్థితి ప్రేరణ కాంటాక్టర్ KNA మరియు ఒక రిలే KB (KL)ని ఆన్ చేయడానికి సరిపోతుంది.
అన్నం. 11. కాంటాక్ట్ SQ మూసివేయబడినప్పుడు మూడు వరకు లెక్కించే పథకం.
అన్నం. 12. SQ పరిచయాన్ని తెరిచేటప్పుడు మూడు వరకు లెక్కించే పథకం
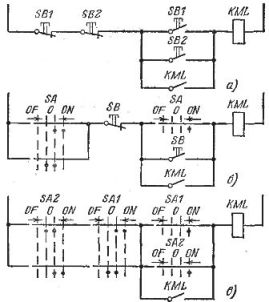
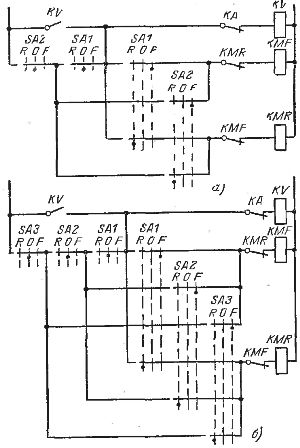
బియ్యం. 13. రెండు ప్రదేశాల నుండి ఇంజిన్ యొక్క కోలుకోలేని నియంత్రణ యొక్క పథకాలు: a - రెండు బటన్లతో, b - ఒక బటన్ మరియు ఒక కీతో, c - రెండు కీలతో.
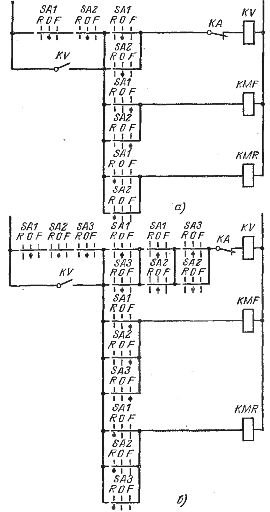
అన్నం. 14. రెండు ప్రదేశాల నుండి ఎలక్ట్రిక్ డ్రైవ్ యొక్క ఒక-వైపు డిపెండెంట్ రివర్సిబుల్ నియంత్రణ యొక్క పథకం.
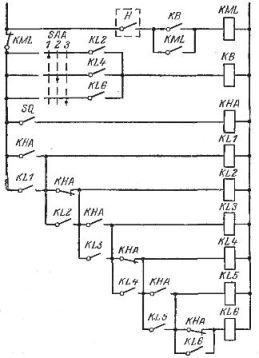
KML లైన్ కాంటాక్టర్ ద్వారా కౌంట్ రీసెట్ చేయబడింది; SQ కాంటాక్టర్ యొక్క క్లోజ్డ్ సమయం KML కాంటాక్టర్ యొక్క సమయం కంటే తక్కువగా ఉండాలి.
పై స్కీమ్లతో సారూప్యతతో కొంచెం పెద్ద సంఖ్యలో లెక్కింపు పథకాలను రూపొందించవచ్చు, అయితే గణన ఐదు లేదా ఎనిమిది కంటే ఎక్కువ ఉన్నప్పుడు లేదా వోల్టేజ్ అదృశ్యమైనప్పుడు లెక్కింపు కోల్పోవడం ఆమోదయోగ్యంకాని సందర్భాల్లో, సంఖ్యను ఉపయోగించమని సిఫార్సు చేయబడింది. రిలేలు.
అన్నం. 15. డిపెండెంట్ రివర్సిబుల్ ఇంజిన్ నియంత్రణ యొక్క పథకాలు: a - రెండు ప్రదేశాల నుండి, b - మూడు ప్రదేశాల నుండి
గరిష్టంగా 30 గణనల వరకు E-526 మోటారు స్టెప్ కౌంట్ రిలే రకం లేదా 75 పల్స్ గణనలతో టైప్ E 531 పల్స్ కౌంట్ రిలేను ఉపయోగించవచ్చు. రిలేలు ఆల్టర్నేటింగ్ కరెంట్పై పనిచేస్తాయి మరియు వాటి పరిచయాలు వరుసగా 220 V వద్ద పవర్-ఆఫ్ను ఎనేబుల్ చేస్తాయి. మరియు DC 50 మరియు 30 వాట్స్.
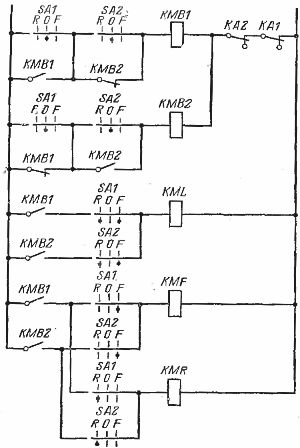
అనేక ప్రదేశాల నుండి ఎలక్ట్రిక్ మోటార్లు యొక్క కంట్రోల్ సర్క్యూట్లు ఆధారపడి ఉంటాయి, ఏకదిశాత్మకంగా మరియు స్వతంత్రంగా ఉంటాయి (Fig. 13). చాలా తరచుగా, ఆధారిత నియంత్రణ పథకాలు (Fig. 15) సరళమైనవిగా ఉపయోగించబడతాయి. ఈ పథకాల ప్రకారం, ఏదైనా నియంత్రణ పరికరాన్ని ఆపరేట్ చేస్తున్నప్పుడు, మరొక పరికరం యొక్క హ్యాండిల్ను సున్నా నుండి ఆపరేటింగ్ స్థానానికి తరలించడం వలన మోటారు ఆగిపోతుంది.
రెండు (Fig. 14) మరియు మూడు (Fig. 16) స్థలాల నుండి వన్-వే డిపెండెంట్ కంట్రోల్ యొక్క పథకాల ప్రకారం, స్విచ్ SA1 స్విచ్ SA2 (SA2 మరియు SA3) యొక్క స్థానం నుండి స్వతంత్రంగా నియంత్రించబడుతుంది. SA1 స్విచ్ సున్నా స్థానంలో ఉన్నప్పుడు మరియు SA3 స్విచ్ యొక్క స్థానంపై ఆధారపడనప్పుడు SA2 స్విచ్ యొక్క నియంత్రణ సాధ్యమవుతుంది. SA1 మరియు SA2 స్విచ్లు సున్నా స్థానంలో ఉన్నప్పుడు SA3 స్విచ్ల నియంత్రణ సాధ్యమవుతుంది.
మూర్తి 16. త్రీ-ప్లేస్ రెసిప్రొకేటింగ్ మోటార్ యొక్క ఏకదిశాత్మక ఆధారిత నియంత్రణ యొక్క స్కీమాటిక్
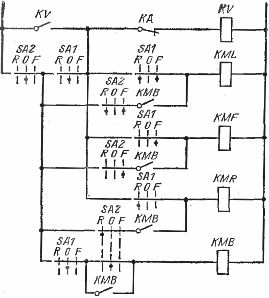
అన్నం. 17. రెండు ప్రదేశాల నుండి ఇంజిన్ యొక్క స్వతంత్ర రివర్సిబుల్ నియంత్రణ పథకం.
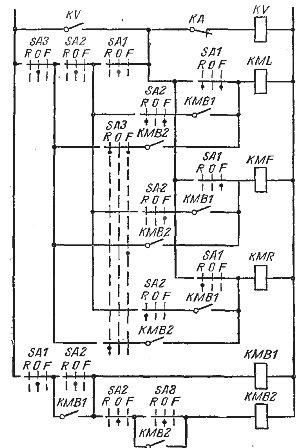
అన్నం. 18. మూడు ప్రదేశాల నుండి ఇంజిన్ యొక్క స్వతంత్ర రివర్సిబుల్ నియంత్రణ పథకం.
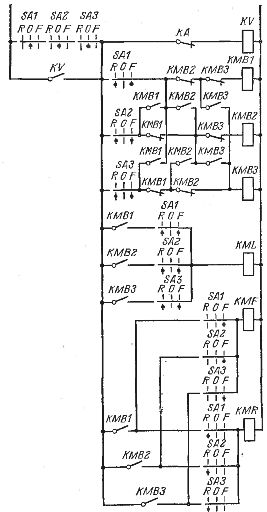
స్వతంత్ర నియంత్రణ పథకాలలో (Fig. 17 మరియు 18), డ్రైవ్ ఏదైనా మొదటి స్విచ్ (SA1, SA2 లేదా SA3) ద్వారా నియంత్రించబడినప్పుడు, ఇతర స్విచ్ యొక్క హ్యాండిల్ను తరలించడం డ్రైవ్ యొక్క ఆపరేషన్ను ప్రభావితం చేయదు. మొదటి కీ యొక్క హ్యాండిల్ యొక్క సున్నా స్థానానికి తిరిగి వచ్చిన తర్వాత, రెండవ కీ (లేదా ఇతర రెండు) యొక్క హ్యాండిల్ యొక్క స్థానంతో సంబంధం లేకుండా యాక్యుయేటర్ ఆగిపోతుంది. రెండవ కీని (లేదా మరో ఇద్దరు) సున్నా స్థానానికి తిరిగి ఇచ్చిన తర్వాత మాత్రమే కొత్త ప్రారంభం సాధ్యమవుతుంది.
చాలా తరచుగా వారు సరళీకృత పథకం (Fig. 19) ప్రకారం రెండు మరియు మూడు ప్రదేశాల నుండి డ్రైవ్ నియంత్రణను ఉపయోగిస్తారు; దీనర్థం ఒకే మొదటి స్థానం (కీ SA1) నుండి ప్రాధాన్యత నియంత్రణ. డ్రైవ్ మరొక స్విచ్ (SA2 లేదా SA3) ద్వారా నియంత్రించబడినప్పుడు, సున్నా స్థానం నుండి మొదటి స్విచ్ యొక్క హ్యాండిల్ను తరలించడం వలన నియంత్రణ ఆ స్విచ్కి బదిలీ చేయబడుతుంది.
అన్నం. 19. రివర్సిబుల్ ఎలక్ట్రిక్ డ్రైవ్ను నియంత్రించడానికి సరళీకృత పథకాలు: a - రెండు ప్రదేశాల నుండి, b - మూడు ప్రదేశాల నుండి.