రెండు-స్పీడ్ మోటార్ కంట్రోల్ సర్క్యూట్
 వివిధ మెటల్ కట్టింగ్ మెషీన్లు, మెకానిజమ్స్ మరియు సాంకేతిక ఇన్స్టాలేషన్లలో, రెండు-స్పీడ్ అసమకాలిక ఎలక్ట్రిక్ మోటారులతో ఎలక్ట్రిక్ డ్రైవ్లు ఉపయోగించబడతాయి, దీనిలో ప్రత్యేకంగా తయారు చేయబడిన స్టేటర్ వైండింగ్ యొక్క స్విచ్చింగ్ సర్క్యూట్ను మార్చడం ద్వారా పోల్ జతల సంఖ్యను మార్చడం ద్వారా వేగం యొక్క దశ నియంత్రణ సాధించబడుతుంది. .
వివిధ మెటల్ కట్టింగ్ మెషీన్లు, మెకానిజమ్స్ మరియు సాంకేతిక ఇన్స్టాలేషన్లలో, రెండు-స్పీడ్ అసమకాలిక ఎలక్ట్రిక్ మోటారులతో ఎలక్ట్రిక్ డ్రైవ్లు ఉపయోగించబడతాయి, దీనిలో ప్రత్యేకంగా తయారు చేయబడిన స్టేటర్ వైండింగ్ యొక్క స్విచ్చింగ్ సర్క్యూట్ను మార్చడం ద్వారా పోల్ జతల సంఖ్యను మార్చడం ద్వారా వేగం యొక్క దశ నియంత్రణ సాధించబడుతుంది. .
ఫిగర్ ఒక కోలుకోలేని ఎలక్ట్రిక్ డ్రైవ్ యొక్క రేఖాచిత్రాన్ని చూపుతుంది రెండు-స్పీడ్ అసమకాలిక మోటార్… సర్క్యూట్ స్టేటర్ వైండింగ్ను డెల్టా నుండి డబుల్ స్టార్కి (Δ / YY) మార్చడానికి అందిస్తుంది. సాంకేతికతకు పని చేసే శరీరం యొక్క స్థిరమైన శక్తితో వేగ నియంత్రణ అవసరమైతే, ఇటువంటి పథకం యంత్రాంగాల ఎలక్ట్రిక్ డ్రైవ్లలో ఉపయోగించబడుతుంది.
సర్క్యూట్ టార్గెటింగ్ ఆదేశాలు మూడు-స్థాన SM కంట్రోలర్ ద్వారా ఇవ్వబడ్డాయి. ప్రారంభ స్థితిలో, యంత్రాలు QF1 మరియు QF2 స్విచ్ ఆన్ చేయబడినప్పుడు మరియు నియంత్రిక సున్నా (ఎడమ) స్థానంలో ఉన్నప్పుడు, KV వోల్టేజ్ రిలే శక్తివంతం అవుతుంది మరియు దాని KV పరిచయం స్వీయ-శక్తిని పొందుతుంది.
కంట్రోలర్ మొదటి స్థానానికి (HC) మారినప్పుడు, కాంటాక్టర్ KM1 (HC) యొక్క కాయిల్ శక్తిని పొందుతుంది, కాంటాక్టర్ పనిచేస్తుంది, బ్రేక్ కాంటాక్టర్ KMT యొక్క కాయిల్ యొక్క సర్క్యూట్లో దాని పరిచయాన్ని 3-6 మూసివేస్తుంది మరియు స్టేటర్ను కలుపుతుంది. డెల్టాలో వైండింగ్ (Δ) నెట్వర్క్కు . అదే సమయంలో, బ్రేక్ కాంటాక్టర్ KMT సక్రియం చేయబడుతుంది మరియు బ్రేక్ సోలనోయిడ్ను శక్తివంతం చేస్తుంది, బ్రేక్ విడుదల చేయబడుతుంది (ప్యాడ్లు ఎత్తివేయబడతాయి) మరియు ఎలక్ట్రిక్ మోటారు తక్కువ వేగంతో ప్రారంభించబడుతుంది (పోల్స్ సంఖ్య 2p).
రెగ్యులేటర్ రెండవ స్థానానికి (BC) మారినప్పుడు, కాంటాక్టర్ వైండింగ్ KMl (HC) మెయిన్స్ నుండి స్టేటర్ వైండింగ్ను డిస్కనెక్ట్ చేస్తుంది. కాంటాక్టర్లు KM2 (BC) మరియు KM3 (BC) యొక్క కాయిల్స్ శక్తివంతం చేయబడతాయి మరియు కాంటాక్టర్లు సక్రియం చేయబడతాయి. కాంటాక్టర్ KM3 (BC), దాని పరిచయాలను మూసివేసి, డబుల్ స్టార్ యొక్క జీరో పాయింట్ను ఏర్పరుస్తుంది. కాంటాక్టర్ KM2 (BC) బ్రేక్ కాంటాక్టర్ KMT యొక్క కాయిల్ సర్క్యూట్లో దాని పరిచయాన్ని 3-6 మూసివేస్తుంది, కాంటాక్టర్ KMT పనిచేస్తుంది లేదా ఆన్లో ఉంటుంది. అదే సమయంలో, కాంటాక్టర్ KM2 (BC) స్టేటర్ వైండింగ్ యొక్క డబుల్ స్టార్ ఎగువ భాగాన్ని కలుపుతుంది, మరియు మోటారు అధిక వేగంతో ప్రారంభమవుతుంది (పోల్స్ సంఖ్య p).
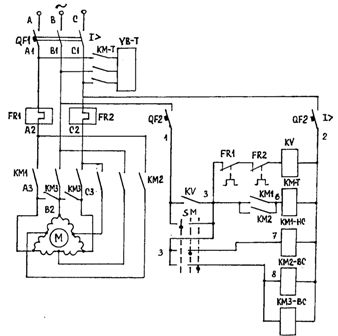
రెండు-స్పీడ్ ఇండక్షన్ మోటార్ యొక్క సర్క్యూట్ రేఖాచిత్రం
ఎలక్ట్రిక్ డ్రైవ్ను ఆపడానికి, నియంత్రికను సున్నా స్థానానికి మార్చడం అవసరం. ఈ సందర్భంలో, కాంటాక్టర్లు శక్తిని కోల్పోతారు, స్టేటర్ వైండింగ్ నెట్వర్క్ నుండి డిస్కనెక్ట్ చేయబడింది మరియు KMT పరిచయాలు తెరవబడతాయి. KMT కాంటాక్టర్ విద్యుదయస్కాంత బ్రేక్ కాయిల్ నుండి శక్తిని తొలగిస్తుంది మరియు బ్రేక్ డ్రమ్కు బ్రేక్ ప్యాడ్లు వర్తించబడతాయి. మెకానికల్ బ్రేక్ యొక్క ప్రతిఘటన క్షణం Mc మరియు క్షణం Mmt చర్యలో ఎలక్ట్రిక్ డ్రైవ్ ఆగిపోతుంది.