ఎలక్ట్రిక్ మోటార్లు యొక్క నియంత్రణ లక్షణాలు
 భౌతిక ప్రక్రియ (ఏదైనా పరామితి) యొక్క ఏదైనా విలువను నియంత్రించడం అంటే ఇచ్చిన విలువను ఇచ్చిన స్థాయిలో నిర్వహించడం లేదా ఇచ్చిన చట్టానికి అనుగుణంగా మార్చడం.
భౌతిక ప్రక్రియ (ఏదైనా పరామితి) యొక్క ఏదైనా విలువను నియంత్రించడం అంటే ఇచ్చిన విలువను ఇచ్చిన స్థాయిలో నిర్వహించడం లేదా ఇచ్చిన చట్టానికి అనుగుణంగా మార్చడం.
వ్యక్తిగత యాక్యుయేటర్లు లేదా ఉత్పాదక యంత్రాంగాలు సాధారణ ఆపరేషన్ కోసం యాక్యుయేటర్ మోటార్ల యొక్క విభిన్న భ్రమణ వేగం అవసరం.
ఉదాహరణకు, పేపర్ మెషీన్లోని ప్రతి విభాగం లోడ్ మార్పులతో సంబంధం లేకుండా ఖచ్చితంగా స్థిరమైన వేగంతో తిప్పాలి మరియు డ్రైవ్ తప్పనిసరిగా ఈ వేగాన్ని కొనసాగించగలగాలి మరియు ప్రతి విభాగం యొక్క వేగాన్ని వ్యక్తిగతంగా మరియు మొత్తం కాగితపు యంత్రం మొత్తాన్ని సజావుగా మార్చగలగాలి.
ఎలక్ట్రిక్ మోటార్ల వేగం వివిధ మార్గాల్లో నియంత్రించబడుతుంది. ప్రొపల్షన్ కోసం డ్రైవ్ మోటార్ యొక్క సరైన ఎంపిక కోసం ఇది తెలుసుకోవాలి. వేగం యొక్క పరిమాణంపై షాఫ్ట్పై శక్తి మరియు క్షణం యొక్క విలువల ఆధారపడటంలో డ్రైవ్లు విభిన్నంగా ఉంటాయి.
కొన్ని యంత్రాంగాలు వేగం మారినప్పుడు స్థిరమైన టార్క్ విలువను నిర్వహిస్తాయి. వీటిలో, ఉదాహరణకు, మెటల్ కట్టింగ్ యంత్రాలు… ఈ సందర్భంలో, శక్తి భ్రమణ వేగానికి అనులోమానుపాతంలో మారుతుంది (గ్రాఫికల్గా, ఇది అంజీర్ 1లో సరళ రేఖ ద్వారా చిత్రీకరించబడింది).
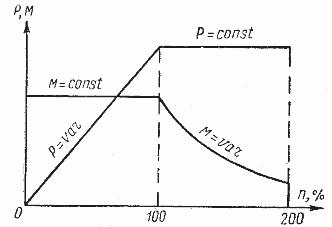
అన్నం. 1. స్థిరమైన శక్తి మరియు స్థిరమైన టార్క్ వద్ద స్పీడ్ కంట్రోల్ వక్రతలు
వేగం మారినప్పుడు ఇతర యంత్రాంగాలకు స్థిరమైన శక్తి P అవసరం (ఉదా ట్రైనింగ్ మరియు రవాణా విధానాలు) ఈ సందర్భంలో, హైపర్బోలా చట్టం ప్రకారం క్షణం యొక్క పరిమాణం మారుతుంది.
మీరు P = Мω10-3kWh, సూత్రాన్ని ఉపయోగించి గ్రాఫ్లను రూపొందించవచ్చు.
ఇక్కడ: M అనేది షాఫ్ట్ యొక్క క్షణం, N x m, ω = (2πn) / 60 — కోణీయ వేగం.
అంజీర్ లో. 1 కంబైన్డ్ కర్వ్లను చూపుతుంది, ఇక్కడ వేగం సున్నా నుండి రేట్కి మారినప్పుడు, టార్క్ స్థిరంగా ఉంటుంది. ఈ సందర్భంలో, శక్తి మూలం గుండా వెళుతున్న సరళ రేఖ వెంట పెరుగుతుంది. అప్పుడు, వేగం మరింత పెరగడంతో, శక్తి స్థిరంగా ఉంటుంది మరియు హైపర్బోలా చట్టం ప్రకారం క్షణం తగ్గుతుంది.
ఇది కూడా చదవండి: ఎలక్ట్రిక్ మోటార్లు మరియు ఉత్పత్తి విధానాల యాంత్రిక లక్షణాలు