లాత్ సమూహం యొక్క మెటల్ కట్టింగ్ మెషీన్ల మెకానిజమ్స్ యొక్క ఎలక్ట్రిక్ మోటార్లు యొక్క శక్తి యొక్క గణన
వేగం నియంత్రణతో ఎలక్ట్రిక్ మోటారు యొక్క శక్తిని లెక్కించేటప్పుడు, యంత్రాంగం యొక్క యాంత్రిక లక్షణాలను పరిగణనలోకి తీసుకోవాలి.
ప్రాథమిక మోషన్ మెకానిజం కోసం, దీనిలో రెండు-జోన్ స్పీడ్ కంట్రోల్ అమలు చేయబడుతుంది: స్థిరమైన టార్క్ మరియు స్థిరమైన శక్తితో, ఎలక్ట్రిక్ మోటారు యొక్క శక్తి సూత్రం ద్వారా లెక్కించబడుతుంది
ఎక్కడ: Mmax — నిరంతర లోడ్ కింద గరిష్ట నిరోధకత మరియు పునరావృత స్వల్పకాలిక లోడ్ కింద గరిష్ట సమానమైన ప్రతిఘటన; ωn - స్థిరమైన టార్క్ సర్దుబాటుతో గరిష్ట వేగం (నామమాత్ర ప్రవాహ రేటు వద్ద).
పవర్ డ్రైవ్ కోసం, శక్తి గరిష్ట సమానమైన టార్క్ మరియు గరిష్ట వేగం ఆధారంగా నిర్ణయించబడుతుంది. స్పీడ్ రెగ్యులేషన్ యొక్క పెద్ద శ్రేణితో, స్వతంత్ర వెంటిలేషన్ లేదా క్లోజ్డ్ రకంతో ఎలక్ట్రిక్ మోటార్లు ఉపయోగించమని సిఫార్సు చేయబడింది. స్వీయ-వెంటిలేషన్తో ఎలక్ట్రిక్ మోటారును ఉపయోగిస్తున్నప్పుడు, తక్కువ వేగంతో దాని శీతలీకరణ యొక్క క్షీణతను పరిగణనలోకి తీసుకోవడం అవసరం.
క్రమబద్ధీకరించని ఇంజిన్ల కోసం, ఒక నియమం వలె, S6 మోడ్లో పనిచేస్తోంది (చక్రం 10 నిమిషాలు మించకపోతే), శక్తి గణన క్రింది విధంగా నిర్వహించబడుతుంది.
ప్రతి ఆపరేషన్ కోసం ఎలక్ట్రిక్ మోటారు యొక్క శక్తి సూత్రం ద్వారా నిర్ణయించబడుతుంది:

ఎక్కడ: Pzi, η — యంత్రం యొక్క శక్తి మరియు సామర్థ్యాన్ని కత్తిరించడం.
లోడ్-ఆధారిత సామర్థ్యం వ్యక్తీకరణ ఆధారంగా శక్తి నష్టాల ఆధారంగా నిర్ణయించబడుతుంది:

ఎక్కడ: Pnz - నామమాత్ర కట్టింగ్ పవర్; α మరియు β - స్థిరమైన మరియు వేరియబుల్ నష్ట గుణకాలు.
లోడ్ కారకాన్ని పరిగణనలోకి తీసుకోవడం

యంత్ర సామర్థ్యం
K = 1 కేసు కోసం
ప్రతి లోడ్ వద్ద సామర్థ్యాన్ని నిర్ణయించడానికి నష్టాలను విభజించడం ఇస్తుంది
ప్రాక్టికల్ లెక్కల కోసం ప్రిలిమినరీ అంగీకరించబడుతుంది
టర్నింగ్, మిల్లింగ్, డ్రిల్లింగ్ యంత్రాల యొక్క ప్రధాన కదలిక యొక్క డ్రైవ్ల కోసం, స్థిరమైన లోడ్ కింద సామర్థ్యం 0.7 ... 0.8, గ్రౌండింగ్ యంత్రాలకు 0.8 ... 0.9. యంత్రం యొక్క నిష్క్రియ విప్లవాల వద్ద ఎలక్ట్రిక్ మోటారు యొక్క శక్తి సూత్రం ద్వారా నిర్ణయించబడుతుంది:

ప్రతి పరివర్తన కోసం ఆపరేషన్ వ్యవధి సూత్రం ద్వారా నిర్ణయించబడుతుంది:

ఎక్కడ: l - పరివర్తన పొడవు, mm; S - ఫీడ్, mm / rev; n - కుదురు యొక్క భ్రమణ వేగం, rev / min.
భాగాన్ని ఇన్స్టాల్ చేయడానికి మరియు తీసివేయడానికి సమయం 1-3 నిమిషాలకు సమానం. ప్రతి ఆపరేషన్ కోసం లెక్కించిన శక్తి మరియు సమయం ఆధారంగా, లోడ్ రేఖాచిత్రం నిర్మించబడింది మరియు సమానమైన శక్తి నిర్ణయించబడుతుంది.

స్పీడ్ కంట్రోల్తో ఎలక్ట్రిక్ డ్రైవ్ను ఉపయోగిస్తున్నప్పుడు, శక్తి పరంగా మోటారును ఎంచుకున్నప్పుడు, లోడ్ మరియు గంటకు ప్రారంభ ఫ్రీక్వెన్సీ రెండింటిలోనూ అత్యంత తీవ్రమైన ఆపరేటింగ్ మోడ్ భావించబడుతుంది.
ఈ సందర్భంలో, ఎలక్ట్రిక్ మోటారు యొక్క ప్రాథమిక ఎంపిక సమానమైన టార్క్ ప్రకారం నిర్వహించబడుతుంది, Kd = 1.1-1.5 పరిమితుల్లో డైనమిక్స్ కోసం భద్రతా కారకాన్ని పరిగణనలోకి తీసుకుంటుంది మరియు చేర్చడానికి చాలా అవకాశం ఉంటుంది.
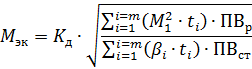
ఎక్కడ: βi — i-th విరామంలో ఎలక్ట్రిక్ మోటారు యొక్క శీతలీకరణ క్షీణతను పరిగణనలోకి తీసుకునే గుణకం, వేగం నామమాత్రం కంటే తక్కువగా పడిపోయినప్పుడు;
β- స్థిర ఆర్మేచర్ విషయంలో ఉష్ణ బదిలీ యొక్క క్షీణత యొక్క గుణకం; PVR, PVst - చేర్చబడిన వ్యవధి యొక్క లెక్కించిన మరియు ప్రామాణిక విలువ.
ఇంజిన్ పవర్ ఫార్ములా ద్వారా నిర్ణయించబడుతుంది
మోటారు, వర్క్పీస్ మరియు యంత్రం యొక్క యాంత్రిక భాగాల యొక్క జడత్వం యొక్క వాస్తవ క్షణాన్ని పరిగణనలోకి తీసుకుని, ఓవర్లోడ్ మరియు తాపన సామర్థ్యం తనిఖీని నిర్వహిస్తారు.