ఓవర్ హెడ్ క్రేన్లతో ఎలక్ట్రిక్ ట్రాలీ డ్రైవ్
ఓవర్హెడ్ క్రేన్తో కూడిన ట్రాలీ అనేది ట్రైనింగ్ పరికరం యొక్క స్వతంత్ర అంశం మరియు సాంకేతికంగా నిర్ణయించబడిన కదలిక వేగం మరియు లోడ్ను ఉంచడానికి అవసరమైన ఖచ్చితత్వంతో ఓవర్హెడ్ క్రేన్ పరిధిలో లోడ్లను తరలించడానికి రూపొందించబడింది. బోగీ డ్రైవ్ ఓవర్ హెడ్ క్రేన్ పరికరాల యొక్క ప్రధాన భాగాలలో ఒకటి.
ట్రాలీ ఓవర్ హెడ్ క్రేన్ ట్రాక్ మీద కదులుతుంది. వంతెన కూడా బండి యొక్క కదలిక దిశకు లంబంగా ఒక దిశలో కదులుతుంది. కార్ట్లో ట్రైనింగ్ మెకానిజం వ్యవస్థాపించబడింది, ఇది హుక్ (లేదా విద్యుదయస్కాంతం) తో అమర్చబడి ఉంటుంది, దానితో మీరు లోడ్ను తరలించవచ్చు. బోగీ యొక్క కదలిక ఓవర్ హెడ్ క్రేన్ (Fig. 1) యొక్క సాంకేతిక చక్రంలో అంతర్భాగం.
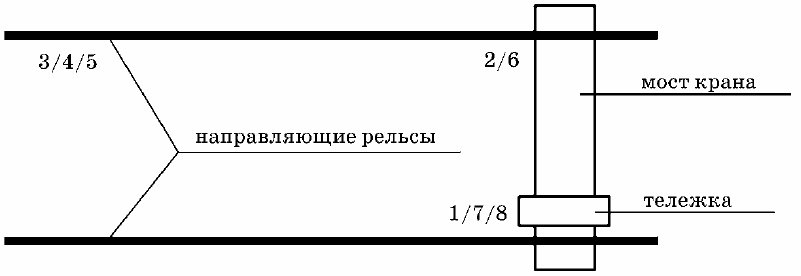
అన్నం. 1. పని చక్రంలో వంతెన క్రేన్తో కార్యకలాపాలను నిర్వహించే పథకం
ఈ చక్రం కింది కార్యకలాపాలను కలిగి ఉంటుంది (మూర్తి 1లో, ఆపరేషన్ సంఖ్యలు సంఖ్యలలో చూపబడ్డాయి):
1 - లోడ్ ట్రైనింగ్;
2 - ఇచ్చిన స్థానానికి బండిని తరలించడం;
3 - క్రేన్ను ముందుగా నిర్ణయించిన స్థానానికి తరలించడం;
4 - భారం యొక్క బరువును తగ్గించడం;
5 - లోడ్ యొక్క బరువుతో హుక్ని ఎత్తడం;
6 - క్రేన్ను దాని అసలు స్థానానికి తరలించడం;
7 - బండిని దాని అసలు స్థానానికి తరలించడం;
8 - హుక్ తగ్గించడం.
ఓవర్హెడ్ క్రేన్ యొక్క ప్రక్రియ చక్రం నుండి చూడవచ్చు, ట్రాలీ డ్రైవ్ మోటార్ రెండవ మరియు ఏడవ ఆపరేషన్లలో ఆన్ చేయబడింది. బోగీ ఓవర్హెడ్ క్రేన్కు దూరంలో ఉన్న స్థానానికి చేరుకున్నప్పుడు, అవసరమైన బ్రేకింగ్ ఖచ్చితత్వాన్ని నిర్ధారించడానికి బోగీ డ్రైవ్ యొక్క ఎలక్ట్రిక్ మోటారు విద్యుత్ బ్రేక్ చేయబడుతుంది.
అప్పుడు ఇంజిన్ స్విచ్ ఆఫ్ చేయబడుతుంది మరియు మెకానికల్ బ్రేక్ వర్తించబడుతుంది. అదనంగా, వంతెన ఉద్యమం యొక్క ఎలక్ట్రిక్ డ్రైవ్ ఆన్ చేయబడింది మరియు సాంకేతిక పని ప్రకారం వర్క్షాప్ వెంట లోడ్ కదులుతుంది. నియమించబడిన ప్రదేశానికి చేరుకున్నప్పుడు, క్రేన్ ఆగిపోతుంది, లోడ్ తగ్గించబడుతుంది, ఆపై అవసరమైన సాంకేతిక కార్యకలాపాలు నిర్వహించబడతాయి.

ఓవర్ హెడ్ క్రేన్లతో ట్రాలీ మూవ్మెంట్ మెకానిజం యొక్క కినిమాటిక్ రేఖాచిత్రం మూర్తి 2 లో చూపబడింది. డ్రైవ్ వీల్స్ మధ్య మధ్యలో గేర్బాక్స్తో పథకం ప్రకారం ట్రాలీ కదలిక మెకానిజం తయారు చేయబడింది.
బ్రేక్ డిస్క్ T, గేర్బాక్స్ P, క్లచ్లు M మరియు షాఫ్ట్ B ద్వారా ఎలక్ట్రిక్ మోటార్ D నుండి డ్రైవ్ నడుస్తున్న చక్రాలకు ప్రసారం చేయబడుతుంది. బండి నిశ్చలంగా ఉంచడానికి బ్రేక్ కప్పి ఉపయోగించబడుతుంది.
బండికి నాలుగు ట్రావెల్ వీల్స్ మరియు రెండు డ్రైవ్ వీల్స్ ఉన్నాయి. క్రేన్ ట్రాలీల ప్రయాణ చక్రాలు సాధారణంగా రెండు పక్కటెముకలతో తయారు చేయబడతాయి.
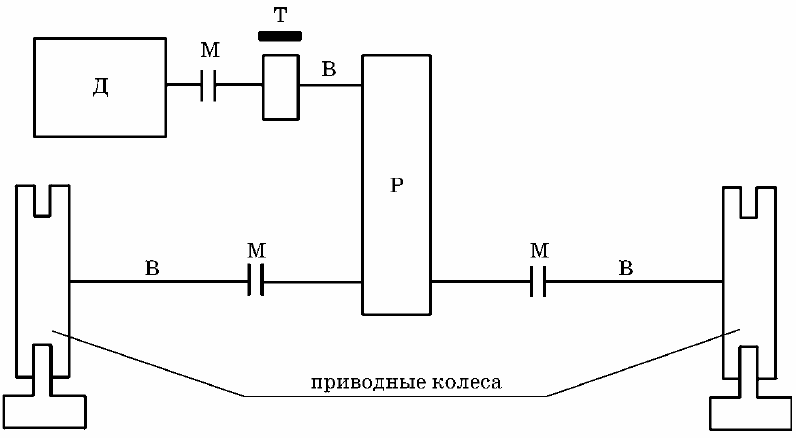
అన్నం. 2. ట్రాలీ కదలిక యంత్రాంగం యొక్క కినిమాటిక్ రేఖాచిత్రం
కార్ట్ను నిర్దేశిత స్థానానికి తరలించే సమయం, అవసరమైన త్వరణంతో బండిని వేగవంతం చేయడానికి మరియు తగ్గించడానికి సమయాన్ని పరిగణనలోకి తీసుకోవడం ద్వారా నిర్ణయించబడుతుంది.సాంకేతిక ప్రక్రియ యొక్క పరిస్థితుల ఆధారంగా, బండిని కదిలేటప్పుడు టాకోగ్రామ్ మూర్తి 3లో చూపిన రూపాన్ని కలిగి ఉండాలి.
అవసరమైన త్వరణంతో ఇచ్చిన వేగంతో బోగీ మెకానిజం యొక్క మృదువైన ప్రారంభాన్ని నిర్ధారించడం అవసరం. అవసరమైన స్థాన ఖచ్చితత్వాన్ని నిర్ధారించడానికి, తగ్గిన వేగానికి పరివర్తనతో ఎలక్ట్రిక్ డ్రైవ్ యొక్క మృదువైన క్షీణత అవసరం, దాని తర్వాత ట్రాలీ ఆగిపోతుంది.
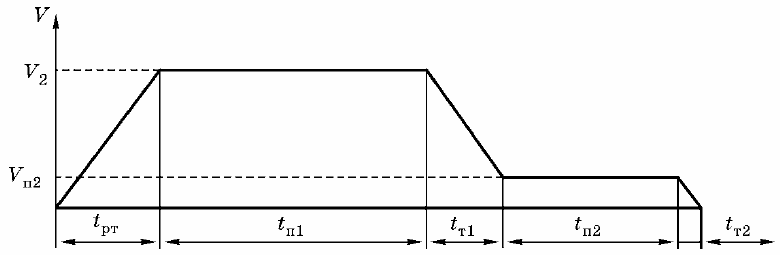
అన్నం. 3. ట్రాలీ కదలిక యంత్రాంగం యొక్క టాచోగ్రామ్
రైలు జాయింట్లలోని లోహ నిర్మాణంపై ప్రభావంతో బోగీ యొక్క కదలిక, తీవ్రమైన త్వరణం మరియు క్షీణత, యంత్రాలు లోడ్ చేయబడినప్పుడు మెటల్ నిర్మాణం యొక్క సహజ కంపనాలు వంతెన క్రేన్ బోగీపై ఉన్న విద్యుత్ పరికరాలపై చాలా తీవ్రమైన యాంత్రిక ప్రభావాలను కలిగిస్తాయి. దీని ఆధారంగా, ట్రాలీని తరలించడానికి ఎలక్ట్రిక్ డ్రైవ్ క్రింది అవసరాలను తీర్చాలి:
1) ఎలక్ట్రిక్ డ్రైవ్ తప్పనిసరిగా కదలికలో మెకానిజంను ప్రారంభించే సామర్థ్యాన్ని అందించాలి, కదలిక దిశను తిప్పికొట్టాలి మరియు అవసరమైన త్వరణం (m / s2) మరియు సరైన స్థాన ఖచ్చితత్వం (మిమీ)తో యంత్రాంగాన్ని ఆపాలి;
2) ఎలక్ట్రిక్ డ్రైవ్ మెయిన్ నుండి డౌన్ స్మూత్ స్పీడ్ కంట్రోల్ని అందించాలి;
3) అభివృద్ధి చెందిన ఇంజిన్ టార్క్ ఇచ్చిన తీవ్రతతో యంత్రాంగం యొక్క ఆపరేషన్ను నిర్ధారించాలి;
4) గంటకు ఇచ్చిన సంఖ్యలో ఇంజిన్ స్టార్ట్ల వద్ద, దాని వైండింగ్ల వేడెక్కడం ఉండకూడదు, దీని కారణంగా మెకానిజం యొక్క సుదీర్ఘ ఆగిపోవడం సాధ్యమవుతుంది;
5) మోటారు తప్పనిసరిగా ఆపరేటింగ్ పరిస్థితులకు అనుగుణంగా ఎంపిక చేయబడాలి, అనగా, దానికి తగిన రూపకల్పన ఉండాలి మరియు దాని వైండింగ్లు వేడి-నిరోధకతను కలిగి ఉండాలి మరియు తేమకు వ్యతిరేకంగా ఇన్సులేషన్ కలిగి ఉండాలి;
6) డ్రైవ్ మోటారు తప్పనిసరిగా అతిచిన్న ఫ్లైవీల్ మాస్లను కలిగి ఉండాలి, ఇది తరచుగా డ్రైవ్ ప్రారంభమయ్యే సమయంలో ట్రాన్సియెంట్ల ప్రవాహంపై గణనీయమైన ప్రభావాన్ని చూపుతుంది;
7) డ్రైవ్ మోటార్ తప్పనిసరిగా రన్నింగ్ మెకానిజం యొక్క శక్తితో సరిపోలాలి మరియు అవసరమైన ఓవర్లోడ్ సామర్థ్యాన్ని కలిగి ఉండాలి;
8) ఎలక్ట్రిక్ డ్రైవ్ కనీస వ్యవధితో తాత్కాలిక ప్రక్రియల ఏర్పాటును నిర్ధారించాలి;
9) ఎలక్ట్రిక్ డ్రైవ్ రూపకల్పనలో భద్రత మరియు నిర్వహణ సౌలభ్యం తప్పనిసరిగా పరిగణనలోకి తీసుకోవాలి.

ఉత్పాదక సదుపాయంలో క్షితిజ సమాంతర ట్రాక్ లైన్పై పనిచేసే మోషన్ మెకానిజమ్ల కోసం స్టాటిక్ మూమెంట్ బేరింగ్లలో ఘర్షణ శక్తులను స్లైడింగ్ చేయడం మరియు ఓవర్హెడ్ క్రేన్ యొక్క పట్టాలపై రోలింగ్ బోగీ చక్రాల రోలింగ్ ఘర్షణ ద్వారా సృష్టించబడుతుంది. ట్రాలీ యొక్క ముందుకు కదలిక సమయంలో యంత్రాంగం యొక్క స్టాటిక్ క్షణం క్రేన్ యొక్క ట్రైనింగ్ సామర్థ్యం ద్వారా నిర్ణయించబడుతుంది. బోగీ యొక్క రివర్స్ కదలిక సమయంలో మెకానిజం యొక్క స్టాటిక్ క్షణం అసంపూర్ణ లోడ్ కోసం లెక్కించబడుతుంది.
ఓవర్హెడ్ క్రేన్ల ట్రాలీ యొక్క ఎలక్ట్రిక్ డ్రైవ్ కోసం, అసమకాలిక స్క్విరెల్-కేజ్ రోటర్ మోటార్లు (సహా వేరియబుల్ ఫ్రీక్వెన్సీ డ్రైవ్లో భాగంగా), గాయం రోటర్ ఇండక్షన్ మోటార్లు మరియు స్వతంత్రంగా ఉత్తేజిత DC మోటార్లు.