మెటల్ కట్టింగ్ మెషీన్ల సహాయక డ్రైవ్ల కోసం ఎలక్ట్రిక్ మోటార్లు ఎంపిక
 మెషిన్ టూల్స్పై సహాయక డ్రైవ్లు (కాలిపర్లు, హెడ్ ప్యాడ్లు, క్రాస్ ఆర్మ్స్ మొదలైన వాటి కోసం త్వరిత డ్రైవ్లు) సాధారణంగా తక్కువ-సమయ లోడ్ మోడ్లో పనిచేస్తాయి. అటువంటి వ్యవధి యొక్క ఎలక్ట్రిక్ డ్రైవ్ యొక్క ఆపరేషన్ మోడ్, దీనిలో ఎలక్ట్రిక్ డ్రైవ్లో చేర్చబడిన అన్ని పరికరాల ఉష్ణోగ్రత ఆపరేషన్ సమయంలో స్థిర విలువను చేరుకోదు మరియు విరామం సమయంలో పరిసర ఉష్ణోగ్రతకు తగ్గుతుంది, దీనిని స్వల్పకాలిక అంటారు.
మెషిన్ టూల్స్పై సహాయక డ్రైవ్లు (కాలిపర్లు, హెడ్ ప్యాడ్లు, క్రాస్ ఆర్మ్స్ మొదలైన వాటి కోసం త్వరిత డ్రైవ్లు) సాధారణంగా తక్కువ-సమయ లోడ్ మోడ్లో పనిచేస్తాయి. అటువంటి వ్యవధి యొక్క ఎలక్ట్రిక్ డ్రైవ్ యొక్క ఆపరేషన్ మోడ్, దీనిలో ఎలక్ట్రిక్ డ్రైవ్లో చేర్చబడిన అన్ని పరికరాల ఉష్ణోగ్రత ఆపరేషన్ సమయంలో స్థిర విలువను చేరుకోదు మరియు విరామం సమయంలో పరిసర ఉష్ణోగ్రతకు తగ్గుతుంది, దీనిని స్వల్పకాలిక అంటారు.
మెటల్ కట్టింగ్ మెషీన్లలో సహాయక డ్రైవ్ల ఆపరేటింగ్ సమయం సాధారణంగా తక్కువగా ఉంటుంది; ఇది 5 - 15 సెకన్లకు మించదు మరియు భారీ యంత్రాలకు మాత్రమే 1 - 1.5 నిమిషాలకు చేరుకుంటుంది. ఈ సమయంలో (t <0.1T) అనుమతించదగిన పరిమితుల్లో ఓవర్లోడ్తో, ఎలక్ట్రిక్ మోటారు సాధారణ వేడెక్కడానికి కూడా వేడెక్కడానికి సమయం లేదు. ఈ సందర్భంలో ఎలక్ట్రిక్ మోటార్ యొక్క రేట్ శక్తి ఓవర్లోడ్ పరిస్థితుల ద్వారా నిర్ణయించబడుతుంది.
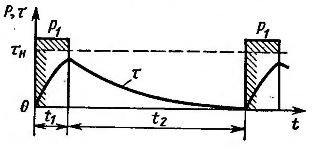
అన్నం. 1. స్వల్పకాలిక ఆపరేషన్ కోసం లోడ్ కర్వ్
సహాయక డ్రైవ్ల ఆపరేషన్ సమయంలో ప్రతిఘటన Mc యొక్క క్షణం ప్రధానంగా ఘర్షణ శక్తుల ద్వారా సృష్టించబడుతుంది మరియు అందువల్ల ఈ డ్రైవ్లు, ప్రధాన కదలిక యొక్క డ్రైవ్ల వలె కాకుండా, ముఖ్యమైన ప్రారంభ టార్క్ అవసరం.
క్షితిజ సమాంతరంగా కదిలే యంత్ర మూలకాన్ని కదిలేటప్పుడు ఘర్షణ శక్తులను అధిగమించడానికి వినియోగించే శక్తి:

ఇక్కడ Ftp - ఘర్షణ శక్తి, N; v - వేగం, m / s; G - తరలించబడుతున్న యూనిట్ యొక్క గురుత్వాకర్షణ (బరువు), N; μ - కదలిక యొక్క ఘర్షణ గుణకం.
మోటార్ షాఫ్ట్ పవర్ P = Ptr /η,
ఎక్కడ η - సి. P. D. ట్రాన్స్మిషన్, సాధారణంగా η = 0.1 — 0.2.
పరిగణించబడిన మోడ్లో ఆపరేషన్ సమయంలో ఎలక్ట్రిక్ మోటారును వేడి చేయడం చాలా తక్కువ. అందువల్ల, దాని అనుమతించదగిన ఓవర్లోడ్ను ఉపయోగించమని సిఫార్సు చేయబడింది.
రేట్ చేయబడిన శక్తి Pn = Ptr /(λη),
ఇక్కడ λ — అనుమతించదగిన ఓవర్లోడ్ యొక్క గుణకం.
సుమారుగా, దాని పని భాగంలో ఇంజిన్ యొక్క లక్షణం స్పష్టంగా ఉందని పరిగణించవచ్చు. అప్పుడు ఓవర్లోడ్ ఆపరేషన్లో మోటార్ యొక్క కోణీయ వేగం
ωλ = ωО (1 — λсн),
ఇక్కడ, ωО = (πнО)/30- ఎలక్ట్రిక్ మోటారు యొక్క సింక్రోనస్ కోణీయ వేగం.
Pn = Ptr /(λη) సూత్రాన్ని ఉపయోగించి, మోటారు యొక్క ఓవర్లోడ్ టార్క్ను కనుగొనండి
ఇంజిన్ను ప్రారంభించే ప్రారంభంలో ప్రతిఘటన యొక్క క్షణం దాని ఆపరేషన్ సమయంలో కంటే ఎక్కువగా ఉంటుంది. ఈ క్షణం
ఇక్కడ μО - విశ్రాంతి వద్ద ఘర్షణ గుణకం.
యంత్రం యొక్క సహాయక డ్రైవ్ల యొక్క ఎలక్ట్రిక్ మోటారులను ఎంచుకునే విధానం
ముందుగా, Pn = Ptr /(λη) సూత్రాన్ని ఉపయోగించి కేటలాగ్ నుండి ఒక ఎలక్ట్రిక్ మోటార్ ఎంపిక చేయబడుతుంది, దీని కోసం ప్రారంభ టార్క్ Mnach నిర్ణయించబడుతుంది. ఫార్ములా ద్వారా Mso క్షణం లెక్కించండి మరియు Mnach క్షణంతో సరిపోల్చండి.0.85 Mnig> Mso అయితే, ఎంచుకున్న మోటారు సహాయక డ్రైవ్కు అనుకూలంగా ఉంటుంది.
మెషిన్ యూనిట్లను టర్నింగ్ మరియు ట్రైనింగ్ కోసం డ్రైవ్లు ఇదే విధంగా లెక్కించబడతాయి, తరువాతి సందర్భంలో మాత్రమే ప్రధాన లోడ్ తరచుగా తరలించబడిన యూనిట్ యొక్క గురుత్వాకర్షణ (బరువు) శక్తి ద్వారా సృష్టించబడుతుంది.
వర్క్పీస్కు సాధనాన్ని త్వరగా చేరుకోవడానికి సరైన వేగాన్ని ఎంచుకోవడం ప్రత్యేక ప్రాముఖ్యత. సాధనం వద్దకు చేరుకున్నప్పుడు, అధిక-వేగం కదలిక కటింగ్ వేగంతో నెమ్మదిగా కదలిక ద్వారా భర్తీ చేయబడుతుంది. సాధనం భాగం నుండి కొంత దూరంలో ఉన్నప్పుడు ఈ వేగ మార్పు సంభవిస్తుంది, లేకపోతే సాధనం అధిక వేగంతో భాగాన్ని కొట్టి విరిగిపోతుంది.
ఒక వేగం నుండి మరొక వేగానికి మారడానికి కొంత సమయం పడుతుంది. ఈ సమయంలో, ఎలక్ట్రికల్ పరికరాలు సక్రియం చేయబడతాయి మరియు కదలిక అధిక వేగంతో కొనసాగుతుంది.వోల్టేజ్ హెచ్చుతగ్గులు మరియు ఇతర యాదృచ్ఛిక కారకాల ప్రభావం కారణంగా పరికరాల ప్రతిస్పందన సమయం మారుతుంది.
కినిమాటిక్ చైన్లో సరైన గేర్ల ఎంపిక ద్వారా సరైన వేగం అందించబడుతుంది. రహదారి యొక్క చివరి విభాగం యొక్క వేగం యొక్క క్రమంగా లేదా మృదువైన స్వయంచాలక తగ్గింపు ద్వారా సమయం మరింత తగ్గింపు సాధ్యమవుతుంది, ఇది అధిక ప్రారంభ వేగాన్ని స్వీకరించడం సాధ్యం చేస్తుంది.