శక్తిని ఆదా చేసే సాధనంగా వేరియబుల్ ఎలక్ట్రిక్ డ్రైవ్
 ఎలక్ట్రిక్ డ్రైవ్ ద్వారా ఎలక్ట్రిక్ డ్రైవ్ మరియు సాంకేతిక రంగంలో శక్తిని ఆదా చేయడానికి క్రమబద్ధీకరించని ఎలక్ట్రిక్ డ్రైవ్ నుండి రెగ్యులేటెడ్కు మారడం ప్రధాన మార్గాలలో ఒకటి.
ఎలక్ట్రిక్ డ్రైవ్ ద్వారా ఎలక్ట్రిక్ డ్రైవ్ మరియు సాంకేతిక రంగంలో శక్తిని ఆదా చేయడానికి క్రమబద్ధీకరించని ఎలక్ట్రిక్ డ్రైవ్ నుండి రెగ్యులేటెడ్కు మారడం ప్రధాన మార్గాలలో ఒకటి.
నియమం ప్రకారం, ఉత్పత్తి యంత్రాంగాల యొక్క ఎలక్ట్రిక్ డ్రైవ్ల వేగం లేదా టార్క్ను నియంత్రించాల్సిన అవసరం సాంకేతిక ప్రక్రియ యొక్క అవసరాల ద్వారా నిర్దేశించబడుతుంది. ఉదాహరణకు, కట్టర్ యొక్క ఫీడ్ రేటు ఒక లాత్పై వర్క్పీస్ను ప్రాసెస్ చేసే శుభ్రతను నిర్ణయిస్తుంది, ఆపే ముందు కారు యొక్క ఖచ్చితమైన స్థానానికి ఎలివేటర్ వేగాన్ని తగ్గించడం అవసరం, వైండింగ్ షాఫ్ట్ యొక్క టార్క్ను సర్దుబాటు చేయవలసిన అవసరం నిర్దేశించబడుతుంది గాయపడిన పదార్థం యొక్క స్థిరమైన ఒత్తిడిని నిర్వహించడానికి పరిస్థితులు మొదలైనవి.
అయినప్పటికీ, సాంకేతిక పరిస్థితులకు అనుగుణంగా వేగంలో మార్పు అవసరం లేని అనేక యంత్రాంగాలు ఉన్నాయి లేదా సాంకేతిక ప్రక్రియ యొక్క పారామితులను ప్రభావితం చేసే ఇతర (విద్యుత్ రహిత) పద్ధతులు నియంత్రణ కోసం ఉపయోగించబడతాయి.
అన్నింటిలో మొదటిది, అవి ఘన, ద్రవ మరియు వాయు ఉత్పత్తులను తరలించడానికి నిరంతర రవాణా విధానాలను కలిగి ఉంటాయి: కన్వేయర్లు, అభిమానులు, అభిమానులు, పంప్ యూనిట్లు. ఈ యంత్రాంగాల కోసం, ప్రస్తుతం, ఒక నియమం వలె, క్రమబద్ధీకరించని అసమకాలిక ఎలక్ట్రిక్ డ్రైవ్లు ఉపయోగించబడతాయి, ఇవి యంత్రాంగాలపై లోడ్తో సంబంధం లేకుండా స్థిరమైన వేగంతో పని చేసే శరీరాలను మోషన్లో సెట్ చేస్తాయి. దాని పాక్షిక లోడ్ కింద, స్థిరమైన వేగంతో ఆపరేటింగ్ మోడ్లు పెరగడం ద్వారా వర్గీకరించబడతాయి నిర్దిష్ట శక్తి వినియోగం నామమాత్రపు మోడ్తో పోలిస్తే.
NSC పనితీరు తగ్గింపు, కన్వేయర్ యొక్క సామర్థ్యం తగ్గుతుంది, ఎందుకంటే వినియోగించే శక్తి యొక్క సాపేక్ష వాటా నిష్క్రియ క్షణాన్ని అధిగమిస్తుంది. వేరియబుల్ స్పీడ్ మోడ్ మరింత పొదుపుగా ఉంటుంది, ఇది అదే పనితీరును అందిస్తుంది, కానీ లాగడం ప్రయత్నంలో స్థిరమైన భాగం.
అంజీర్ లో. 1 స్థిరమైన (v — const) మరియు సర్దుబాటు (Fg = const) లోడ్ల కదలిక వేగం కోసం నిష్క్రియ క్షణం Mx = 0, ЗМвతో కన్వేయర్ కోసం మోటారు షాఫ్ట్ యొక్క శక్తి ఆధారపడటాన్ని చూపుతుంది. చిత్రంలో షేడెడ్ ప్రాంతం వేగ నియంత్రణ ద్వారా పొందిన శక్తి పొదుపును సూచిస్తుంది.
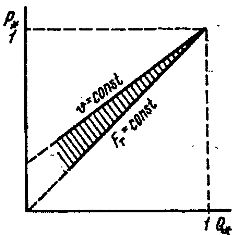
అన్నం. 1. కన్వేయర్ యొక్క పనితీరుపై ఎలక్ట్రిక్ మోటార్ షాఫ్ట్ యొక్క శక్తి యొక్క ఆధారపడటం
కాబట్టి కన్వేయర్ వేగం నామమాత్ర విలువలో 60%కి తగ్గించబడితే, అప్పుడు మోటార్స్ షాఫ్ట్ పవర్ నామమాత్ర విలువతో పోలిస్తే 10% తగ్గుతుంది. స్పీడ్ రెగ్యులేషన్ ప్రభావం ఎక్కువగా ఉంటుంది, ఎక్కువ నిష్క్రియ టార్క్ ఉంటుంది మరియు ఇది కన్వేయర్ పనితీరును మరింత గణనీయంగా తగ్గిస్తుంది.
అండర్లోడింగ్తో నిరంతర రవాణా యంత్రాంగాల వేగాన్ని తగ్గించడం వలన తక్కువ నిర్దిష్ట శక్తి వినియోగంతో అవసరమైన పనిని నిర్వహించడానికి మిమ్మల్ని అనుమతిస్తుంది, అనగా ఉత్పత్తులను తరలించే సాంకేతిక ప్రక్రియలో శక్తి వినియోగాన్ని తగ్గించే పూర్తిగా ఆర్థిక సమస్యను పరిష్కరించడానికి.
సాధారణంగా, అటువంటి యంత్రాంగాల వేగం తగ్గింపుతో, సాంకేతిక పరికరాల కార్యాచరణ లక్షణాల మెరుగుదల కారణంగా ఆర్థిక ప్రభావం కూడా కనిపిస్తుంది. కాబట్టి, వేగం తగ్గినప్పుడు, కన్వేయర్ బాడీ యొక్క దుస్తులు తగ్గుతాయి, ద్రవాలు మరియు వాయువులను సరఫరా చేయడానికి యంత్రాలు అభివృద్ధి చేసిన పీడనం తగ్గడం వల్ల పైప్లైన్లు మరియు ఫిట్టింగుల సేవా జీవితం పెరుగుతుంది మరియు ఈ ఉత్పత్తుల యొక్క అదనపు వినియోగం కూడా తొలగించబడుతుంది.
సాంకేతికత రంగంలో ప్రభావం తరచుగా శక్తి పొదుపు కారణంగా కంటే గణనీయంగా ఎక్కువగా ఉంటుంది, అందుకే శక్తి అంశాన్ని మాత్రమే మూల్యాంకనం చేయడం ద్వారా అటువంటి యంత్రాంగాల కోసం నియంత్రిత ఎలక్ట్రిక్ డ్రైవ్ను ఉపయోగించడం యొక్క సలహాను నిర్ణయించడం ప్రాథమికంగా తప్పు.
పార యంత్రాల వేగ నియంత్రణ.
ద్రవాలు మరియు వాయువుల (అభిమానులు, పంపులు, ఫ్యాన్లు, కంప్రెసర్లు) సరఫరా కోసం సెంట్రిఫ్యూగల్ మెకానిజమ్లు నిర్దిష్ట శక్తి వినియోగాన్ని గణనీయంగా తగ్గించడానికి దేశవ్యాప్తంగా గొప్ప సామర్థ్యాన్ని కలిగి ఉన్న ప్రధాన సాధారణ పారిశ్రామిక యంత్రాంగాలు. సెంట్రిఫ్యూగల్ మెకానిజమ్స్ యొక్క ప్రత్యేక స్థానం వారి భారీతనం, అధిక శక్తి, ఒక నియమం వలె, సుదీర్ఘ ఆపరేటింగ్ మోడ్తో వివరించబడింది.
ఈ పరిస్థితులు దేశం యొక్క శక్తి సమతుల్యతలో ఈ యంత్రాంగాల గణనీయమైన వాటాను నిర్ణయిస్తాయి.పంపులు, ఫ్యాన్లు మరియు కంప్రెసర్ల కోసం డ్రైవ్ మోటార్ల యొక్క మొత్తం వ్యవస్థాపించిన సామర్థ్యం అన్ని పవర్ ప్లాంట్ల సామర్థ్యంలో 20% ఉంటుంది, అయితే అభిమానులు మాత్రమే దేశంలో ఉత్పత్తి చేయబడిన మొత్తం విద్యుత్తులో 10% వినియోగిస్తారు.
సెంట్రిఫ్యూగల్ మెకానిజమ్స్ యొక్క ఆపరేటింగ్ లక్షణాలు ప్రవాహ రేటు Qపై హెడ్ H మరియు ప్రవాహ రేటు Qపై పవర్ P ఆధారపడటం రూపంలో ప్రదర్శించబడతాయి. స్థిరమైన ఆపరేషన్ మోడ్లో, అపకేంద్ర యంత్రాంగం ద్వారా సృష్టించబడిన తల సమతుల్యం చేయబడుతుంది. ద్రవ లేదా వాయువును అందించే హైడ్రో- లేదా ఏరోడైనమిక్ నెట్వర్క్ యొక్క ఒత్తిడి.
ఒత్తిడి యొక్క స్టాటిక్ భాగం పంపుల కోసం నిర్ణయించబడుతుంది - వినియోగదారు మరియు పంపు స్థాయిల మధ్య జియోడెసిక్ వ్యత్యాసం ద్వారా; అభిమానుల కోసం - సహజ ఆకర్షణ; అభిమానులు మరియు కంప్రెషర్లకు - నెట్వర్క్ (రిజర్వాయర్) లో సంపీడన వాయువు పీడనం నుండి.
పంప్ మరియు నెట్వర్క్ యొక్క Q-H-లక్షణాల ఖండన స్థానం H-Hn మరియు Q - Qn పారామితులను నిర్ణయిస్తుంది. స్థిరమైన వేగంతో పనిచేసే పంపు యొక్క ప్రవాహం రేటు Q యొక్క నియంత్రణ సాధారణంగా అవుట్లెట్లోని వాల్వ్ ద్వారా నిర్వహించబడుతుంది మరియు నెట్వర్క్ లక్షణంలో మార్పుకు దారితీస్తుంది, దీని ఫలితంగా ప్రవాహం రేటు QA * <1 అనుగుణంగా ఉంటుంది పంప్ యొక్క లక్షణంతో ఖండన స్థానం.
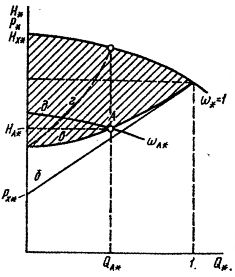
అన్నం. 2. పంపింగ్ యూనిట్ యొక్క Q-H- లక్షణాలు
ఎలక్ట్రికల్ సర్క్యూట్లతో సారూప్యతతో, వాల్వ్ ద్వారా ప్రవాహాన్ని నియంత్రించడం అనేది సర్క్యూట్ యొక్క విద్యుత్ నిరోధకతను పెంచడం ద్వారా కరెంట్ను నియంత్రించడం వలె ఉంటుంది. సహజంగానే, ఈ నియంత్రణ పద్ధతి శక్తి దృక్కోణం నుండి సమర్థవంతమైనది కాదు, ఎందుకంటే ఇది నియంత్రణ మూలకాలలో (రెసిస్టర్, వాల్వ్) ఉత్పాదకత లేని శక్తి నష్టాలతో కూడి ఉంటుంది. వాల్వ్ నష్టం అంజీర్లోని షేడెడ్ ప్రాంతం ద్వారా వర్గీకరించబడుతుంది. 1.
ఎలక్ట్రికల్ సర్క్యూట్లో వలె, దాని వినియోగదారు కంటే శక్తి వనరును నియంత్రించడం మరింత పొదుపుగా ఉంటుంది. ఈ సందర్భంలో, సోర్స్ వోల్టేజ్లో తగ్గుదల కారణంగా విద్యుత్ వలయాలలో లోడ్ కరెంట్ తగ్గుతుంది. హైడ్రాలిక్ మరియు ఏరోడైనమిక్ నెట్వర్క్లలో, మెకానిజం సృష్టించిన ఒత్తిడిని తగ్గించడం ద్వారా ఇదే విధమైన ప్రభావం పొందబడుతుంది, ఇది దాని ఇంపెల్లర్ యొక్క వేగాన్ని తగ్గించడం ద్వారా గ్రహించబడుతుంది.
వేగం మారినప్పుడు, సెంట్రిఫ్యూగల్ మెకానిజమ్స్ యొక్క ఆపరేటింగ్ లక్షణాలు సారూప్యత యొక్క చట్టాలకు అనుగుణంగా మారుతాయి, ఇవి రూపాన్ని కలిగి ఉంటాయి: Q * = ω *, H * = ω *2, P * = ω *3
పంప్ ఇంపెల్లర్ వేగం దాని లక్షణం పాయింట్ A గుండా వెళుతుంది:
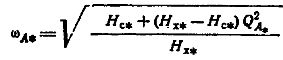
వేగ నియంత్రణ సమయంలో పంపు వినియోగించే శక్తికి వ్యక్తీకరణ:

సహజ థ్రస్ట్ ద్వారా నిర్ణయించబడిన తల యొక్క స్టాటిక్ భాగం Hx కంటే చాలా తక్కువగా ఉంటుంది కాబట్టి, వేగంపై క్షణం యొక్క చతుర్భుజ ఆధారపడటం ప్రధానంగా అభిమానులకు లక్షణం. సాంకేతిక సాహిత్యంలో, వేగంపై క్షణం యొక్క సుమారు ఆధారపడటం కొన్నిసార్లు ఉపయోగించబడుతుంది, ఇది సెంట్రిఫ్యూగల్ మెకానిజం యొక్క ఈ ఆస్తిని పరిగణనలోకి తీసుకుంటుంది:
M* = ω *n
ఇక్కడ n = 2 వద్ద Hc = 0 మరియు nHc> 0. లెక్కలు మరియు ప్రయోగాలు n=2 — 5 అని చూపుతాయి మరియు దాని పెద్ద విలువలు గణనీయమైన వెనుక ఒత్తిడితో నెట్వర్క్లో పనిచేసే కంప్రెసర్ల లక్షణం.
స్థిరమైన మరియు వేరియబుల్ వేగంతో పంప్ ఆపరేటింగ్ మోడ్ల విశ్లేషణ ω= const వద్ద అదనపు శక్తి వినియోగం చాలా ముఖ్యమైనదిగా మారుతుందని చూపిస్తుంది. ఉదాహరణకు, పారామితులతో పంప్ యొక్క ఆపరేటింగ్ మోడ్ల గణన ఫలితాలు Hx * = 1.2 క్రింద చూపబడ్డాయి; విభిన్న బ్యాక్ ప్రెజర్ ఉన్న నెట్వర్క్లో Px*= 0.3 Зс:
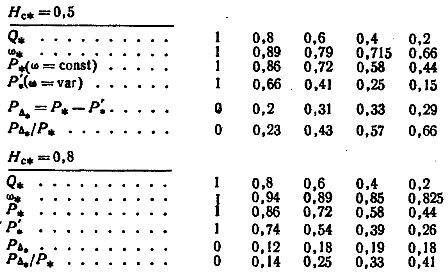
నియంత్రిత విద్యుత్ డ్రైవ్ వినియోగించే విద్యుత్ వినియోగాన్ని గణనీయంగా తగ్గించగలదని ఇచ్చిన డేటా చూపిస్తుంది: మొదటి సందర్భంలో 66% మరియు రెండవ సందర్భంలో 41% వరకు. ఆచరణలో, ఈ ప్రభావం మరింత ఎక్కువగా ఉంటుంది, ఎందుకంటే వివిధ కారణాల వల్ల (వాల్వ్ల లేకపోవడం లేదా పనిచేయకపోవడం, మాన్యువల్ యాక్చుయేషన్), కవాటాల ద్వారా నియంత్రణ అస్సలు వర్తించదు, ఇది విద్యుత్ వినియోగం పెరుగుదలకు మాత్రమే కాకుండా, హైడ్రాలిక్ నెట్వర్క్లో అధిక ప్రయత్నాలు మరియు ఖర్చులకు.
స్థిరమైన పారామితులతో నెట్వర్క్లోని సింగిల్-యాక్టింగ్ సెంట్రిఫ్యూగల్ మెకానిజమ్స్ యొక్క శక్తి సమస్యలు పైన చర్చించబడ్డాయి. ఆచరణలో, సెంట్రిఫ్యూగల్ మెకానిజమ్స్ యొక్క సమాంతర ఆపరేషన్ ఉంది మరియు నెట్వర్క్ తరచుగా వేరియబుల్ పారామితులను కలిగి ఉంటుంది. ఉదాహరణకు, మైనింగ్ నెట్వర్క్ యొక్క ఏరోడైనమిక్ నిరోధకత గోడల పొడవులో మార్పుతో మారుతుంది, నీటి సరఫరా నెట్వర్క్ల యొక్క హైడ్రోడైనమిక్ నిరోధకత నీటి వినియోగం యొక్క మోడ్ ద్వారా నిర్ణయించబడుతుంది, ఇది రోజులో మారుతుంది, మొదలైనవి.
సెంట్రిఫ్యూగల్ మెకానిజమ్స్ యొక్క సమాంతర ఆపరేషన్తో, రెండు కేసులు సాధ్యమే:
1) అన్ని యంత్రాంగాల వేగం ఏకకాలంలో మరియు ఏకకాలంలో నియంత్రించబడుతుంది;
2) ఒక మెకానిజం లేదా మెకానిజమ్స్లో కొంత భాగం యొక్క వేగం నియంత్రించబడుతుంది.
నెట్వర్క్ పారామితులు స్థిరంగా ఉంటే, మొదటి సందర్భంలో అన్ని మెకానిజమ్లను ఒక సమానమైనదిగా పరిగణించవచ్చు, దీనికి పైన పేర్కొన్న అన్ని సంబంధాలు చెల్లుతాయి. రెండవ సందర్భంలో, యంత్రాంగాల యొక్క క్రమబద్ధీకరించబడని భాగం యొక్క ఒత్తిడి వెనుక పీడనం వలె నియంత్రిత భాగంపై అదే ప్రభావాన్ని కలిగి ఉంటుంది మరియు ఇది చాలా ముఖ్యమైనది, అందుకే ఇక్కడ విద్యుత్తు ఆదా నామమాత్రపు శక్తిలో 10-15% మించదు. యంత్రం యొక్క.
వేరియబుల్ నెట్వర్క్ పారామితులు నెట్వర్క్తో సెంట్రిఫ్యూగల్ మెకానిజమ్ల సహకారం యొక్క విశ్లేషణను బాగా క్లిష్టతరం చేస్తాయి. ఈ సందర్భంలో, నియంత్రిత ఎలక్ట్రిక్ డ్రైవ్ యొక్క శక్తి సామర్థ్యాన్ని ఒక ప్రాంతం రూపంలో నిర్ణయించవచ్చు, దీని సరిహద్దులు నెట్వర్క్ పారామితుల పరిమితి విలువలకు మరియు సెంట్రిఫ్యూగల్ మెకానిజం యొక్క వేగానికి అనుగుణంగా ఉంటాయి.
ఈ అంశంపై కూడా చూడండి: పంప్ యూనిట్ల కోసం VLT AQUA డ్రైవ్ ఫ్రీక్వెన్సీ కన్వర్టర్లు